-

Getting Started with Phaser Part 1: Web Server
As I learn to use the Phaser framework to make simple browser-based games, I figured I would chronicle my adventures and hopefully help others out. “Why a web web server?” As it turns out, when most browsers run a page as a local file, it locks down access to many other files, which we need…
-

Virtual Gamepad Plugin for Phaser
I am currently working on a simple arcade game intended for smartphones, and after some research, I decided to develop it using JavaScript and Phaser. Getting an arcade-style controller on a mobile app requires a specialized “joystick” (the accompanying buttons are fairly straightforward). The basic concept is to have an area where a player can touch that…
-

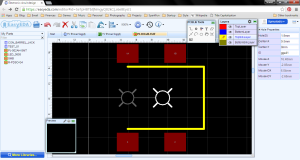
Getting Started with EasyEDA Part 3: PCB Layout
Exporting Schematic to PCB Last week, we finished creating our schematic. In your schematic, click on the Convert Project to PCB… button. You should be presented with an initial board outline and your components connected by air wires.
-
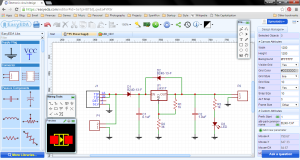
Getting Started with EasyEDA Part 2: Schematic Capture
Placing Parts in the Schematic We made the parts we need in Part 1, so now we can create the schematic for our linear regulator. Click on the File icon, select New, and click Schematic. In the parts selector, make sure My Parts is selected, click on our custom part (CON_BARREL_JACK), and click somewhere on the schematic to place…
-
Getting Started with EasyEDA Part 1: Part Creation
Introduction Free, online development and CAD tools are becoming more popular and powerful, and PCB layout tools are no exception. In this, we are going to look at how to create a simple schematic in EasyEDA, turn it into a PCB, and send out the design files to a PCB house for fabrication. We will…